标签:多边形 重叠 点积 矢量 投影 碰撞检测 Theorem Separating const
目录
引子
在 Collision Detection :Transformation 中介绍了动态的碰撞检测,至此 CollisionDetection 项目的主要内容差不多都涉及了。在查询资料的时候,还接触到一些其它的检测方法,现在来看一下另外一种检测方法: Separating Axis Theorem 。
相关知识点
矢量和标量
简单的来说:
- 矢量(vector)也称向量,有大小和方向的量,例如加速度、力。
- 标量(scalar)只有大小(magnitude)的量,例如时间、温度。
在几何中,矢量用有向线段表示,表示如下:
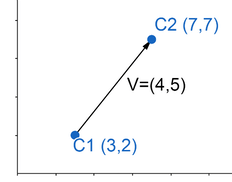
矢量 V 计算方法:
- V = C2 - C1
- V = (7-3,7-2)
- V = (4,5)
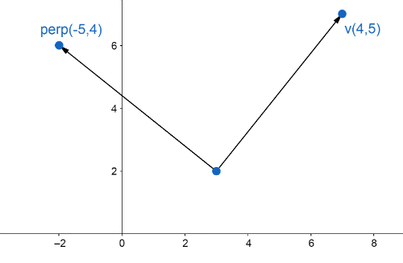
法向量:向量的垂直向量,交换 x 和 y 分量,然后将坐标 x 分量取反。上面 V 的法向量为 (-5,4) 。
点积和投影
点积
两个矢量,可以用点积(Dot Product)的方式进行相乘,结果是一个标量。表示形式为: A · B 。
点积有两种计算方式:
方式一
A · B = Ax * Bx + Ay * By
方式二
A · B = |A| * |B| * cos(θ)
- |A| 是矢量 A 的量值
- |B| 是矢量 A 的量值
- θ 是矢量 A 和 B 之间的角度
还需要了解的一个概念就是单位向量,单位向量计算方法:向量除以向量自身的量值。
A / |A|
更多信息见这里。
投影
关于投影(Projection),先看下图:
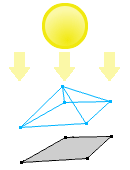
想象用一个发出平行光线的光源,照射到一个物体上,将在一个面上产生阴影。这个阴影是三维物体的二维投影。
类似的,二维物体的投影就是一维的“阴影”。
点积和投影的关系
利用点积可以得出一个矢量在另外一个矢量上的投影。通过简单的推导就可以明白。
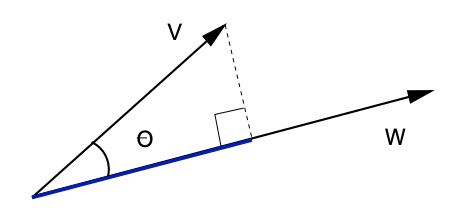
如上图所示,将 V 在 W 上的投影标量记为 Pw(V),可以得知:
Pw(V) = |V| * cos(θ)
根据点积计算方法得知:
V · W = |V| * |W| * cos(θ)
V * (W / |W|) = |V| * cos(θ)
因此可以得出:
Pw(V) = |V| * cos(θ) = V * (W / |W|)
多边形
凸多边形
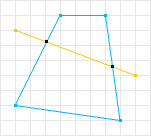
一条直线穿过一个多边形时,如果该线与多边形相交不超过(包含)两次,则该多边形为凸多边形(Convex Polygon)。
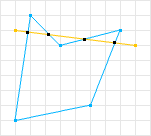
凹多边形
一条直线穿过一个多边形时,如果该线与多边形相交超过两次,则该多边形为凹多边形(Concave Polygon)。
Separating Axis Theorem
分轴理论(Separating Axis Theorem)由 Hermann Minkowski 提出,可用于解决凸多边形碰撞问题,该理论表明:
如果存在一条轴线,两个凸面物体在该轴上的投影没有重叠,那么这两个凸面物体就没有重叠。
这个轴线称为分轴。接下来进一步讨论一下。在下文中分轴理论简称 SAT 。
没有重叠
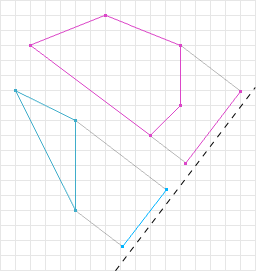
在上图中,可以看到投影没有重叠,根据 SAT ,这个两个形状没有重叠。
SAT 在检测的时候,可能需要检测很多轴线,但只要检测到有一个轴线上投影没有重叠,就可以停止继续检测。由于这种特点,SAT 对于有很多物体但碰撞很少的应用(游戏、模拟等等)是理想的选择。
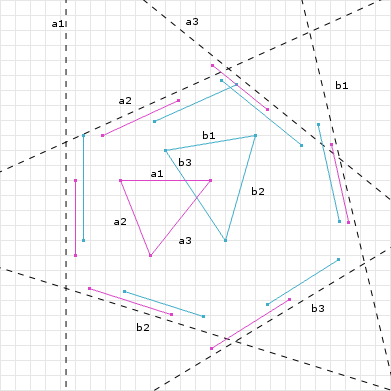
重叠
如果在所有分轴上,形状的投影都重叠,那么我们可以确定这些形状产生了重叠。示例如下:
算法实现
有了上面的原理,接下来转换成算法需要考虑的问题有:
- 如何获取到所有潜在的分轴?
- 投影重叠判断依据是什么?
问题 1
通过查找资料,第一个问题的答案是:在 2D 中,所有潜在的分轴是形状每条边的法线。
法线简单来说就是没有方向的法向量。在前面的知识点中有介绍。下面是一个大概逻辑实现:
const vertices = [] // 顶点的坐标集合,假设已有值
const axes = [] // 存放分轴
const verticesLen = vertices.length;
for (let i = 0; i < verticesLen; i++) {
const p1 = vertices[i];
const p2 = vertices[i + 1 == vertices.length ? 0 : i + 1];
// 获取每条边的矢量代数表示,subtract 方法功能主要功能是 p2 的坐标与 p1 坐标分量相减
const edge = subtract(p1,p2);
// 获取法向量,normalAxes 方法主要功能: (x, y) => (-y, x) or (y, -x)
const normal = normalAxes(edge);
axes.push(normal);
}
问题 2
在上面的关于 SAT 的介绍中,在图示中可以比较明显观察到,在算法实现中,需要遍历形状所有的顶点与分轴执行点积,比较获得最小值和最大值。然后在一条轴线上大概标注出最小值和最大值,看是否有重叠的区间。
下面是一个大概逻辑实现:
假设有多边形 A 和多边形 B 。
const verticesA = []; // A 形状所有顶点坐标集合
const verticesB = []; // B 形状所有顶点坐标集合
const axes = [] // 存储获取的所有分轴
const axesLen = axes.length;
for (let i = 0; i < axesLen; i++) {
const separateAxes = axes[i];
// getProject 方法获取投影的最大和最小值
const projectA = getProject(separateAxes,verticesA);
const aMin = projectA.min;
const aMax = projectA.max;
const projectB = getProject(separateAxes,verticesB);
const bMin = projectB.min;
const bMax = projectB.max;
// 符合该条件,表示投影重叠了。
if ( (aMin <= bMax && aMin >= bMin) || (bMin <= aMax && bMin >= aMin) ) {
continue;
} else {
return false;
}
}
验证
根据上面的思路,以网页左上角作为坐标原点,水平向左作为 X 轴,垂直向下作为 Y 轴。根据 CSS 的单位描述坐标点。
这个是测试页面,移动端如下:

在上面测试页面中,以未重叠的投影数据为例,检测的数据投影到一条轴线上:
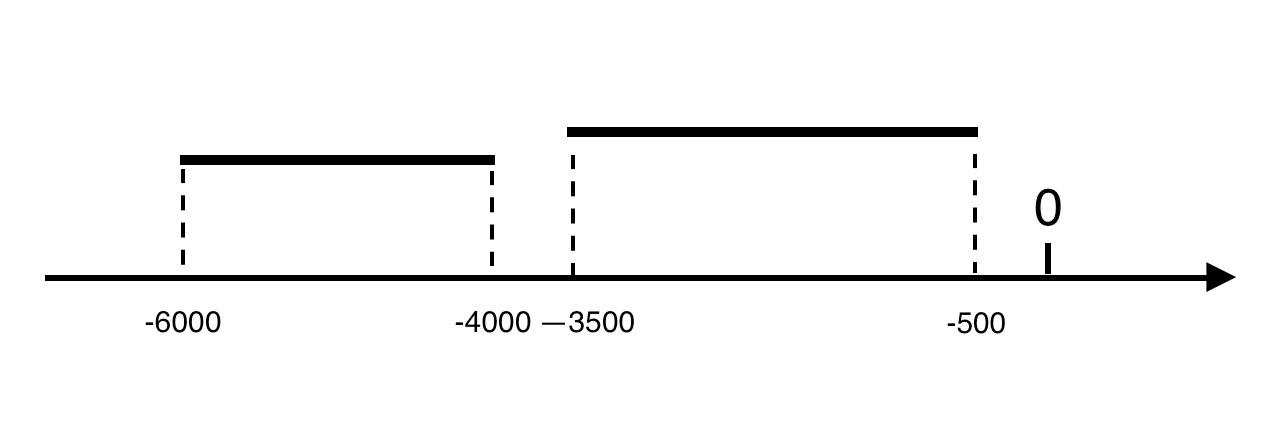
可以看出没有重叠。
Back to top参考资料
- Separating Axis Theorem
- SAT (Separating Axis Theorem)
- Collision Detection and Response
- Collision Detection Using the Separating Axis Theorem
- Dot product and vector projections
标签:多边形,重叠,点积,矢量,投影,碰撞检测,Theorem,Separating,const 来源: https://www.cnblogs.com/thyshare/p/13800823.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。