标签:PIN 电机 模式 STM32 TMC5160 MODE 步进 GPIO

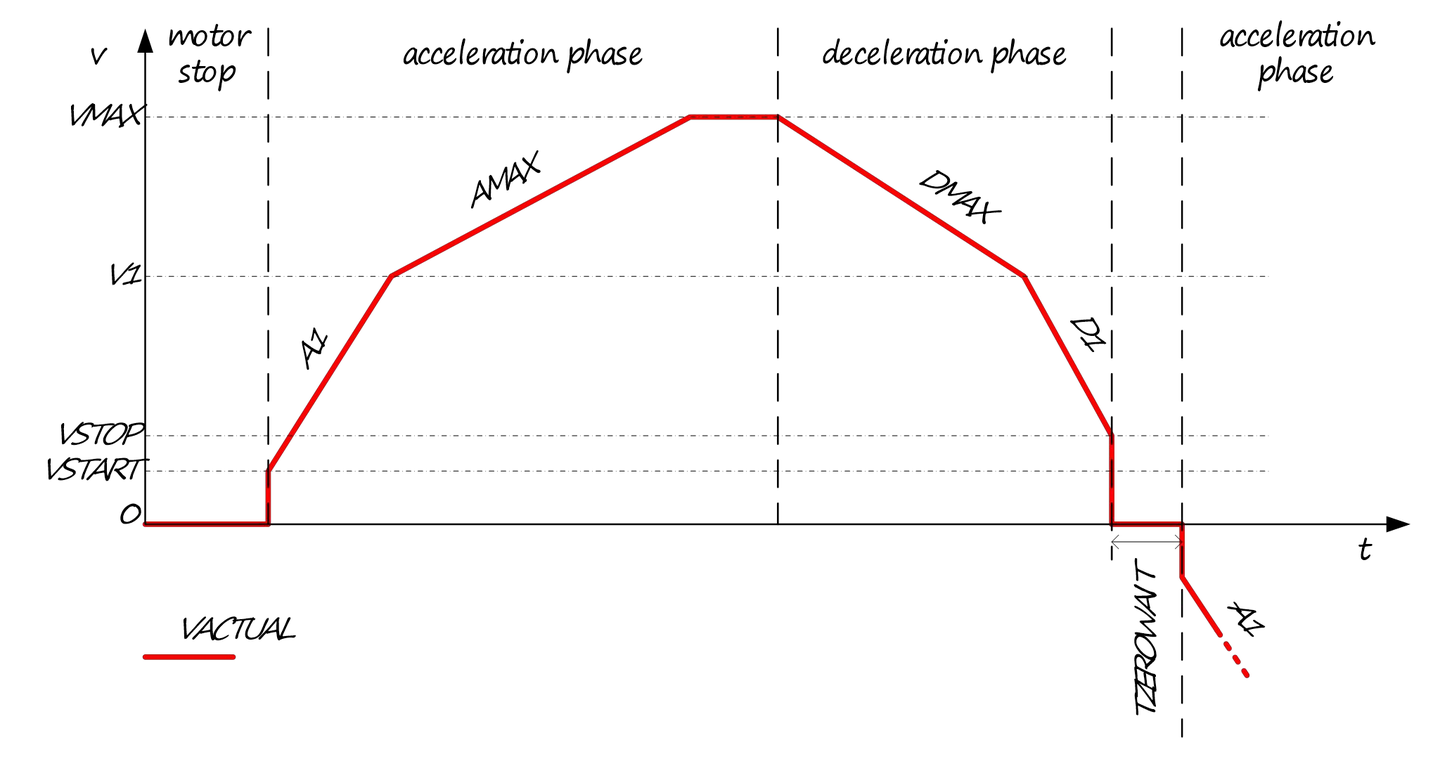
首先先来了解一下TMC5160的3种工作模式 TMC5160通过两个引脚来控制它的工作模式:SD_MODE和SPI_MODE。 1、当SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模式1(SPI控制模式)。在该模式下,用户通过SPI接口来设置TMC5160的寄存器。 TMC5160使用自己的梯形曲线发生器来控制步进电机转动,用户需要设置:开始运动速度VSTART、第一段折线末速度V1、最大速度VMAX、停止速度VSTOP、第一段折线的加速度A1、第二段折线加速度AMAX、第四段折线的减速度DMAX、第五段折线的减速度D1。把上面的参数设置好,再设置工作模式:速度模式和位置模式。最后再设置目标位置。 如果是速度模式运行,不需要设置目标位置,电机就会开始转动。如果是位置模式,则需要设置目标位置,且目标位置与电机当前位置值不同电机才会转动。下图中的红线是电机的实际速度,不管是速度模式还是位置模式,电机的运行过程会按照下图来进行。
 2、当SD_MODE接高电平,SPI_MODE拉高,TMC5160工作在模式2(SPI+S/D)。在该模式下,用户通过SPI接口来设置TMC5160的寄存器。TMC5160的功能和DRV8825类似,外界通过脉冲和方向引脚来控制步进电机运动。
3、当SD_MODE接高电平,SPI_MODE接地,TMC5160工作在模式3(S/D独立模式)。在该模式下,SPI接口失能,TMC5160的工作状态由CFG引脚配置,外界通过脉冲和方向引脚来控制步进电机运动。TMC5160可以完全独立工作,不需要接CPU。
目前是实现电机的简单转动,下面将用模式三来控制电机。
该模式下不需要通过SPI通讯,配置相关GPIO引脚和发送频率一定的正弦波即可。TMC5160的GPIO和STM32的引脚对应如下表:
2、当SD_MODE接高电平,SPI_MODE拉高,TMC5160工作在模式2(SPI+S/D)。在该模式下,用户通过SPI接口来设置TMC5160的寄存器。TMC5160的功能和DRV8825类似,外界通过脉冲和方向引脚来控制步进电机运动。
3、当SD_MODE接高电平,SPI_MODE接地,TMC5160工作在模式3(S/D独立模式)。在该模式下,SPI接口失能,TMC5160的工作状态由CFG引脚配置,外界通过脉冲和方向引脚来控制步进电机运动。TMC5160可以完全独立工作,不需要接CPU。
目前是实现电机的简单转动,下面将用模式三来控制电机。
该模式下不需要通过SPI通讯,配置相关GPIO引脚和发送频率一定的正弦波即可。TMC5160的GPIO和STM32的引脚对应如下表:
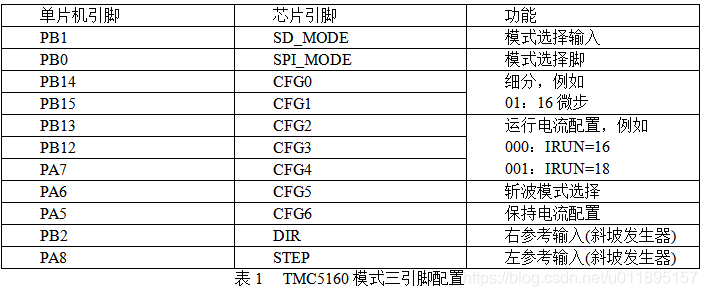 先将SD_MODE接地,SPI_MODE拉高(PB1=1,PB=0),进入独立模式。
其它引脚的参数可以参考TMC5160数据手册根据自己的需求进行设置。初始化程序如下:
先将SD_MODE接地,SPI_MODE拉高(PB1=1,PB=0),进入独立模式。
其它引脚的参数可以参考TMC5160数据手册根据自己的需求进行设置。初始化程序如下:
void TMC5160_Init3(void) //模式三独立模式
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
GPIO_Initure.Pin=GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6|GPIO_PIN_5,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_14|GPIO_PIN_13|GPIO_PIN_12|GPIO_PIN_1,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15|GPIO_PIN_2|GPIO_PIN_0,GPIO_PIN_RESET);
}
然后PA8需要输出PWM方波,方波的频率决定电机转动速度,可以用PWM通道的方式搞定,也可以用定时器中断来做,这边采用定时器中断的方法,
例如,STM32F103的时钟频率为72M,分频设为72,装载值设为500,每0.5ms中断一次,PA8电平取反,1KHZ的方波就完成了。频率可以改变。程序如下:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&TIM3_Handler))
{
COUNT++;
A8=~A8;
if(COUNT>=6400)
{
//HAL_NVIC_DisableIRQ(TIM3_IRQn);
LED=1; //转一圈,停2s后继续
delay_ms(2000);
LED=0;
COUNT=0;
}
}
}
实现的功能是让电机转1圈后停2s后继续。
采用四相电机,脉冲数控制电机转多少,电机步距角位1.8°,一个脉冲转1.8°,200个脉冲一圈,采用16细分,那么一圈就需要3200个脉冲。
电机转动的速度就由脉冲频率决定,可以根据细分及脉冲频率来换算电机实际转速。
标签:PIN,电机,模式,STM32,TMC5160,MODE,步进,GPIO 来源: https://www.cnblogs.com/xing2/p/16653368.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。