标签:nn self backbone ResNet 残差 stride 模块 planes out
本文主要贡献代码模块(文末),在本文中对resnet进行了改写,是一份原始版本模块,里面集成了权重文件pth的载入模块(如函数:init_weights(self, pretrained=None)),layers的冻结模块(如函数:_freeze_stages(self)),更是将其改写成可读性高的代码,若你需要执行该模块,可直接将其代码模块粘贴成.py文件即可。而理论模块,并非本文重点,因此借鉴博客:https://zhuanlan.zhihu.com/p/42706477 ,我将不在说明:
注:本人也意在改写更多backbones模块,后续将会放入该github中,可供代码下载:https://github.com/tangjunjun966/backbones
ResNet的作者何凯明也因此摘得CVPR2016最佳论文奖,当然何博士的成就远不止于此,感兴趣的可以去搜一下他后来的辉煌战绩。那么ResNet为什么会有如此优异的表现呢?其实ResNet是解决了深度CNN模型难训练的问题,从图2中可以看到14年的VGG才19层,而15年的ResNet多达152层,这在网络深度完全不是一个量级上,所以如果是第一眼看这个图的话,肯定会觉得ResNet是靠深度取胜。事实当然是这样,但是ResNet还有架构上的trick,这才使得网络的深度发挥出作用,这个trick就是残差学习(Residual learning)。下面详细讲述ResNet的理论及实现。
深度网络的退化问题
从经验来看,网络的深度对模型的性能至关重要,当增加网络层数后,网络可以进行更加复杂的特征模式的提取,所以当模型更深时理论上可以取得更好的结果,从图2中也可以看出网络越深而效果越好的一个实践证据。但是更深的网络其性能一定会更好吗?实验发现深度网络出现了退化问题(Degradation problem):网络深度增加时,网络准确度出现饱和,甚至出现下降。这个现象可以在图3中直观看出来:56层的网络比20层网络效果还要差。这不会是过拟合问题,因为56层网络的训练误差同样高。我们知道深层网络存在着梯度消失或者爆炸的问题,这使得深度学习模型很难训练。但是现在已经存在一些技术手段如BatchNorm来缓解这个问题。因此,出现深度网络的退化问题是非常令人诧异的。
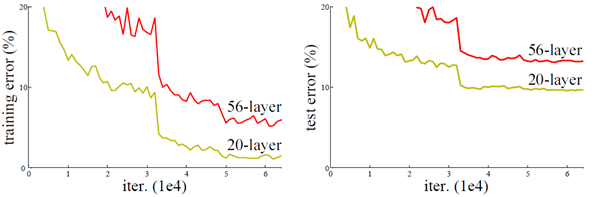 图3 20层与56层网络在CIFAR-10上的误差
图3 20层与56层网络在CIFAR-10上的误差
残差学习
深度网络的退化问题至少说明深度网络不容易训练。但是我们考虑这样一个事实:现在你有一个浅层网络,你想通过向上堆积新层来建立深层网络,一个极端情况是这些增加的层什么也不学习,仅仅复制浅层网络的特征,即这样新层是恒等映射(Identity mapping)。在这种情况下,深层网络应该至少和浅层网络性能一样,也不应该出现退化现象。好吧,你不得不承认肯定是目前的训练方法有问题,才使得深层网络很难去找到一个好的参数。
这个有趣的假设让何博士灵感爆发,他提出了残差学习来解决退化问题。对于一个堆积层结构(几层堆积而成)当输入为 时其学习到的特征记为
,现在我们希望其可以学习到残差
,这样其实原始的学习特征是
。之所以这样是因为残差学习相比原始特征直接学习更容易。当残差为0时,此时堆积层仅仅做了恒等映射,至少网络性能不会下降,实际上残差不会为0,这也会使得堆积层在输入特征基础上学习到新的特征,从而拥有更好的性能。残差学习的结构如图4所示。这有点类似与电路中的“短路”,所以是一种短路连接(shortcut connection)。
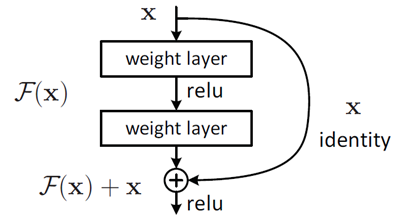 图4 残差学习单元
图4 残差学习单元
为什么残差学习相对更容易,从直观上看残差学习需要学习的内容少,因为残差一般会比较小,学习难度小点。不过我们可以从数学的角度来分析这个问题,首先残差单元可以表示为:
其中 和
分别表示的是第
个残差单元的输入和输出,注意每个残差单元一般包含多层结构。
是残差函数,表示学习到的残差,而
表示恒等映射,
是ReLU激活函数。基于上式,我们求得从浅层
到深层
的学习特征为:
利用链式规则,可以求得反向过程的梯度:
式子的第一个因子 表示的损失函数到达
的梯度,小括号中的1表明短路机制可以无损地传播梯度,而另外一项残差梯度则需要经过带有weights的层,梯度不是直接传递过来的。残差梯度不会那么巧全为-1,而且就算其比较小,有1的存在也不会导致梯度消失。所以残差学习会更容易。要注意上面的推导并不是严格的证明。
ResNet的网络结构
ResNet网络是参考了VGG19网络,在其基础上进行了修改,并通过短路机制加入了残差单元,如图5所示。变化主要体现在ResNet直接使用stride=2的卷积做下采样,并且用global average pool层替换了全连接层。ResNet的一个重要设计原则是:当feature map大小降低一半时,feature map的数量增加一倍,这保持了网络层的复杂度。从图5中可以看到,ResNet相比普通网络每两层间增加了短路机制,这就形成了残差学习,其中虚线表示feature map数量发生了改变。图5展示的34-layer的ResNet,还可以构建更深的网络如表1所示。从表中可以看到,对于18-layer和34-layer的ResNet,其进行的两层间的残差学习,当网络更深时,其进行的是三层间的残差学习,三层卷积核分别是1x1,3x3和1x1,一个值得注意的是隐含层的feature map数量是比较小的,并且是输出feature map数量的1/4。
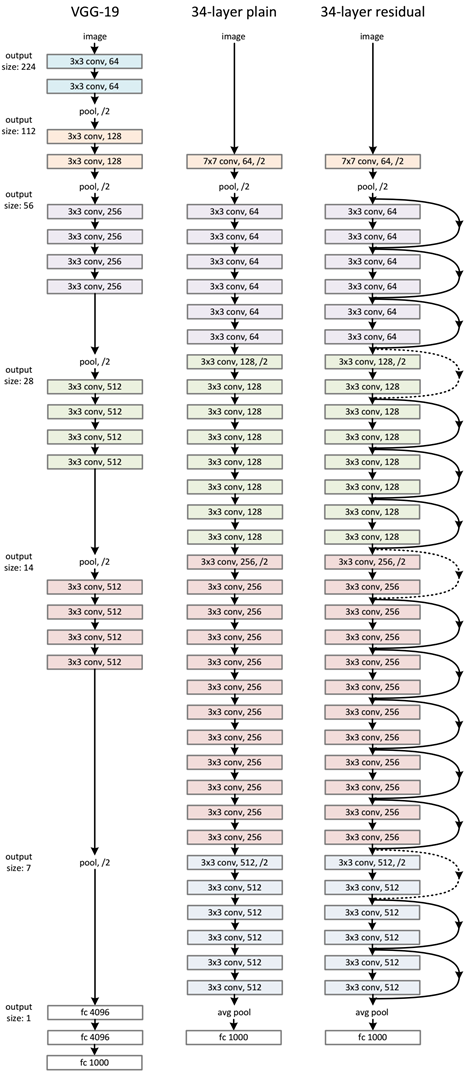 图5 ResNet网络结构图
图5 ResNet网络结构图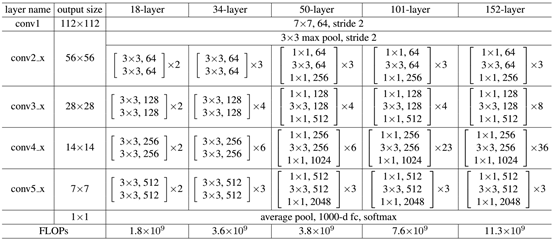 表1 不同深度的ResNet
表1 不同深度的ResNet
下面我们再分析一下残差单元,ResNet使用两种残差单元,如图6所示。左图对应的是浅层网络,而右图对应的是深层网络。对于短路连接,当输入和输出维度一致时,可以直接将输入加到输出上。但是当维度不一致时(对应的是维度增加一倍),这就不能直接相加。有两种策略:(1)采用zero-padding增加维度,此时一般要先做一个downsamp,可以采用strde=2的pooling,这样不会增加参数;(2)采用新的映射(projection shortcut),一般采用1x1的卷积,这样会增加参数,也会增加计算量。短路连接除了直接使用恒等映射,当然都可以采用projection shortcut。
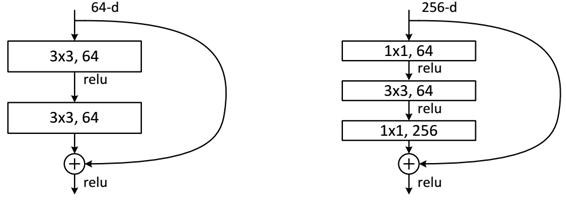 图6 不同的残差单元
图6 不同的残差单元
作者对比18-layer和34-layer的网络效果,如图7所示。可以看到普通的网络出现退化现象,但是ResNet很好的解决了退化问题。
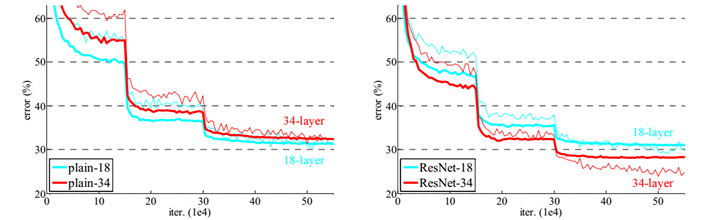 图7 18-layer和34-layer的网络效果
图7 18-layer和34-layer的网络效果
最后展示一下ResNet网络与其他网络在ImageNet上的对比结果,如表2所示。可以看到ResNet-152其误差降到了4.49%,当采用集成模型后,误差可以降到3.57%。
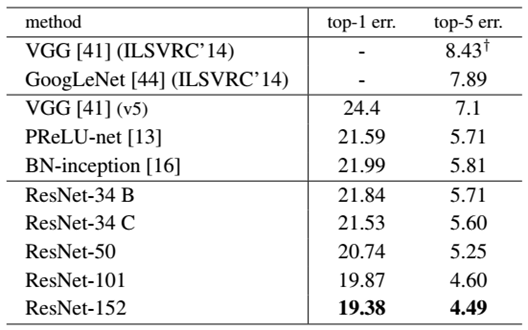 表2 ResNet与其他网络的对比结果
表2 ResNet与其他网络的对比结果
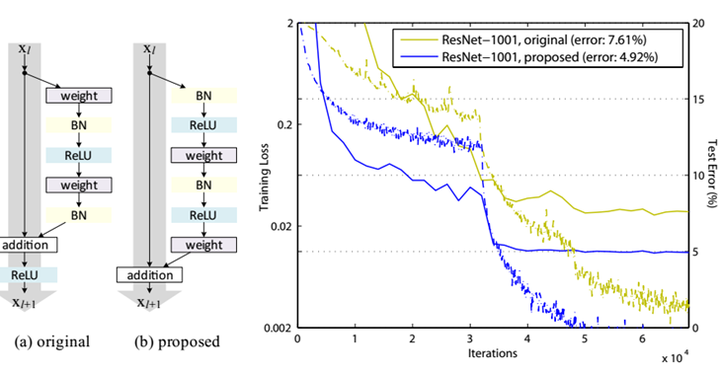
说一点关于残差单元题外话,上面我们说到了短路连接的几种处理方式,其实作者在文献[2]中又对不同的残差单元做了细致的分析与实验,这里我们直接抛出最优的残差结构,如图8所示。改进前后一个明显的变化是采用pre-activation,BN和ReLU都提前了。而且作者推荐短路连接采用恒等变换,这样保证短路连接不会有阻碍。感兴趣的可以去读读这篇文章。
代码如下:
"""
@author: tangjun
@contact: 511026664@qq.com
@time: 2020/12/7 22:48
@desc: resnet 模块
"""
import torch.nn as nn
import torch
from collections import OrderedDict
def Conv(in_planes, out_planes, **kwargs):
"3x3 convolution with padding"
padding = kwargs.get('padding', 1)
bias = kwargs.get('bias', False)
stride = kwargs.get('stride', 1)
kernel_size = kwargs.get('kernel_size', 3)
out = nn.Conv2d(in_planes, out_planes, kernel_size=kernel_size, stride=stride, padding=padding, bias=bias)
return out
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = Conv(inplanes, planes, stride=stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = Conv(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class Resnet(nn.Module):
arch_settings = {
18: (BasicBlock, (2, 2, 2, 2)),
34: (BasicBlock, (3, 4, 6, 3)),
50: (Bottleneck, (3, 4, 6, 3)),
101: (Bottleneck, (3, 4, 23, 3)),
152: (Bottleneck, (3, 8, 36, 3))
}
def __init__(self, depth,
in_channels=None,
pretrained=None,
frozen_stages=-1
# num_classes=None
):
self.inplanes = 64
super(Resnet, self).__init__()
self.inchannels = in_channels if in_channels is not None else 3 # 输入通道
# self.num_classes=num_classes
self.block, layers = self.arch_settings[depth]
self.frozen_stages=frozen_stages
self.conv1 = nn.Conv2d(self.inchannels, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(self.block, 64, layers[0], stride=1)
self.layer2 = self._make_layer(self.block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(self.block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(self.block, 512, layers[3], stride=2)
# self.avgpool = nn.AvgPool2d(7)
# self.fc = nn.Linear(512 * self.block.expansion, self.num_classes)
self._freeze_stages() # 冻结函数
def _freeze_stages(self):
if self.frozen_stages >= 0:
self.norm1.eval()
for m in [self.conv1, self.norm1]:
for param in m.parameters():
param.requires_grad = False
for i in range(1, self.frozen_stages + 1):
m = getattr(self, 'layer{}'.format(i))
m.eval()
for param in m.parameters():
param.requires_grad = False
def init_weights(self, pretrained=None):
if isinstance(pretrained, str):
self.load_checkpoint(pretrained)
elif pretrained is None:
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, a=0, mode='fan_out', nonlinearity='relu')
if hasattr(m, 'bias') and m.bias is not None: # m包含该属性且m.bias非None # hasattr(对象,属性)表示对象是否包含该属性
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def load_checkpoint(self, pretrained):
checkpoint = torch.load(pretrained)
if isinstance(checkpoint, OrderedDict):
state_dict = checkpoint
elif isinstance(checkpoint, dict) and 'state_dict' in checkpoint:
state_dict = checkpoint['state_dict']
if list(state_dict.keys())[0].startswith('module.'):
state_dict = {k[7:]: v for k, v in checkpoint['state_dict'].items()}
unexpected_keys = [] # 保存checkpoint不在module中的key
model_state = self.state_dict() # 模型变量
for name, param in state_dict.items(): # 循环遍历pretrained的权重
if name not in model_state:
unexpected_keys.append(name)
continue
if isinstance(param, torch.nn.Parameter):
# backwards compatibility for serialized parameters
param = param.data
try:
model_state[name].copy_(param) # 试图赋值给模型
except Exception:
raise RuntimeError(
'While copying the parameter named {}, '
'whose dimensions in the model are {} not equal '
'whose dimensions in the checkpoint are {}.'.format(
name, model_state[name].size(), param.size()))
missing_keys = set(model_state.keys()) - set(state_dict.keys())
print('missing_keys:',missing_keys)
def _make_layer(self, block, planes, num_blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, num_blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
outs = []
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
outs.append(x)
x = self.layer2(x)
outs.append(x)
x = self.layer3(x)
outs.append(x)
x = self.layer4(x)
outs.append(x)
# x = self.avgpool(x)
# x = x.view(x.size(0), -1)
# x = self.fc(x)
return tuple(outs)
if __name__ == '__main__':
x = torch.ones((2, 3, 215, 215))
model = Resnet(depth=50)
model.init_weights(pretrained='./resnet50.pth')
# out = model(x)
#
# print(out)
标签:nn,self,backbone,ResNet,残差,stride,模块,planes,out 来源: https://www.cnblogs.com/tangjunjun/p/14947868.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。